
.png) hace 2 días
36
hace 2 días
36
Explicativo
Desarrollado por ETH Zurich, el robot ANYmal-D demuestra habilidades avanzadas de percepción, movilidad y coordinación en pruebas reales de juego.
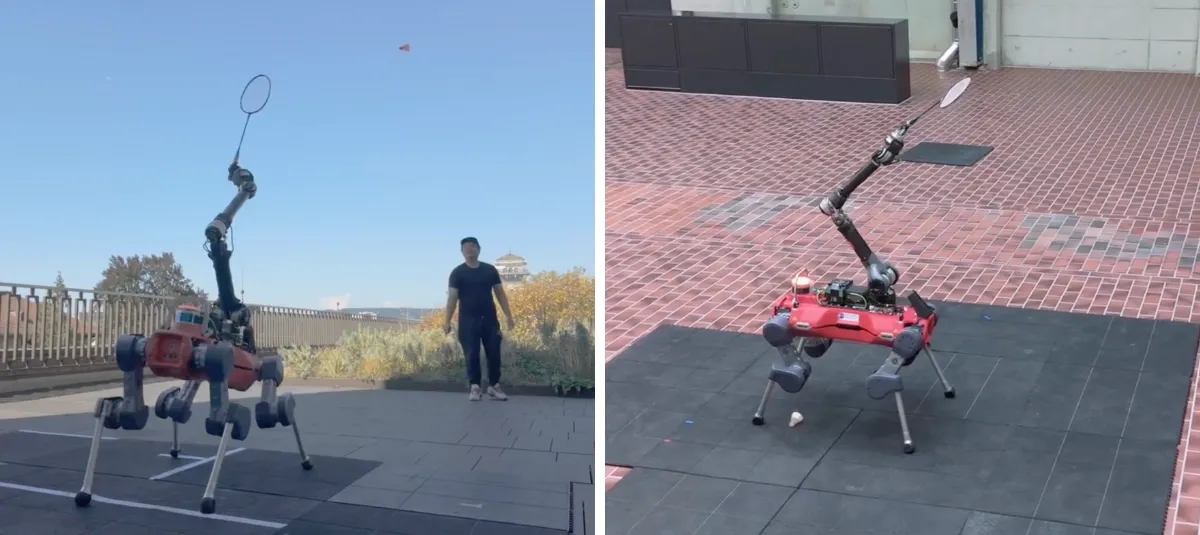
El robot puede jugar bádminton contra humanos. Foto: ScienceRobotics

04.06.2025 09:06 Actualizado: 04.06.2025 09:28
Un equipo de investigadores del Robotic Systems Lab de ETH Zurich, en Suiza, ha diseñado, construido y probado un robot cuadrúpedo capaz de jugar bádminton contra jugadores humanos.
El desarrollo, basado en un sistema de control por aprendizaje por refuerzo, fue publicado en la revista 'Science Robotics' y demuestra la viabilidad de utilizar robots con múltiples extremidades en escenarios deportivos dinámicos.
El robot, denominado ANYmal-D, está equipado con una cámara estéreo y un brazo dinámico que sostiene una raqueta. Su diseño de cuatro patas, a diferencia de las dos que utilizan los humanos, le otorga mayor estabilidad y flexibilidad en sus desplazamientos por la cancha. El controlador de aprendizaje por refuerzo permite que el robot identifique, siga y responda a la trayectoria del volante (shuttlecock), incluso durante secuencias rápidas de juego.
El sistema permite al robot predecir trayectorias con precisión, moverse por el área de juego y devolver golpes con agilidad. En pruebas realizadas por los investigadores, ANYmal-D logró mantener peloteos de hasta diez golpes con jugadores humanos, ajustando su postura y desplazamiento de forma coordinada para interceptar y devolver el volante.

Puede devolver golpes con agilidad. Foto:ScienceRobotics
El proyecto también integró un modelo de percepción con ruido, que permite al robot ajustar su comportamiento en función de la calidad de la percepción visual. Este enfoque equilibra automáticamente el movimiento ágil del robot con la fiabilidad de su percepción, como explicó el investigador Yuntao Ma.
"Introdujimos un modelo de percepción con ruido que vincula el movimiento del robot con la calidad de percepción. Esto permitió que el algoritmo de aprendizaje por refuerzo equilibrara automáticamente entre el movimiento ágil del robot y una percepción confiable", señaló Ma.
Durante las pruebas, el robot alcanzó velocidades de seguimiento de hasta 12,06 metros por segundo, pudo elevarse sobre sus patas traseras para mejorar la visibilidad del volante y ajustó su equilibrio para optimizar el rendimiento.

Puede ajustar su comportamiento. Foto:ScienceRobotics
No obstante, el sistema mostró limitaciones al enfrentar golpes agresivos como los “smashes”, debido a la velocidad de sus actuadores y una latencia de respuesta de 0,375 segundos. Los investigadores reconocen que mejoras en la velocidad de percepción serán necesarias para un desempeño competitivo en partidos de cancha completa.
Desde una perspectiva técnica, el estudio, publicado en 'Science Robotics', destaca que el algoritmo de control fue entrenado de manera unificada, sin separar las funciones de las extremidades superiores e inferiores. Esto permitió que las extremidades aprendieran a compensarse entre sí, logrando una coordinación de movimiento de cuerpo completo.
Yuntao Ma también indicó que los principios de este desarrollo podrían extenderse a otras plataformas, como robots humanoides, y a aplicaciones más allá del deporte, incluyendo operaciones de rescate y servicios domésticos.
“El algoritmo de control también se generaliza a otras plataformas robóticas, como los humanoides, y a tareas como búsqueda y rescate o servicios en el hogar”, afirmó el investigador.
Have you seen a robot that can play badminton with humans? @ETH_en just made it possible.
Researchers at the @dynsyslab Robotic Systems Lab have built a four-legged robot named ANYmal-D, a robot that rallies using a robotic arm, stereo vision, and reinforcement learning. pic.twitter.com/XFHqm3GaNX
Un paso más en la integración de robots en entornos complejos
El éxito de ANYmal-D en un entorno deportivo rápido y variable como el bádminton representa un avance significativo en la robótica móvil autónoma.
La combinación de locomoción, percepción visual y manipulación en tiempo real, integrada mediante aprendizaje automático, refuerza el potencial de los robots para operar en tareas dinámicas y complejas, tanto en contextos recreativos como funcionales.
*Este contenido fue escrito con la asistencia de una inteligencia artificial, basado en información de conocimiento público divulgado a medios de comunicación. Además, contó con la revisión de la periodista y una editora.
Más noticias en EL TIEMPO
SOFÍA ARIAS MARTÍNEZ
REDACCIÓN ALCANCE DIGITAL
EL TIEMPO
Sigue toda la información de Cultura en Facebook y X, o en nuestra newsletter semanal.








 English (US) ·
English (US) ·  Spanish (CO) ·
Spanish (CO) ·